

ソフトバンク新プランNtrip(G-VRS)を試してみた · 22.10.2025
ichimillとNtrip(G-VRS)をEMLID単点計測で比較してみた
SoftBankの高精度測位サービス「ichimill
」と、公共測量で広く利用されている「Ntrip(G-VRS)
」を、EMLID
製RTK受信機を用いて単点計測し比較しました。EMLIDはNtrip互換の汎用RTK機であり、CLAS系のichimillおよび電子基準点網のG-VRSの両方式に対応できるため、同一条件下での比較が可能です。計測はJGD2011(正高)基準で公共基準点を複数回観測し、再現性を確認しました。その結果、水平位置は両方式でほぼ完全に一致し、Z値はichimillが基準点より数mm高め、G-VRSが数mm低めという傾向を示しました。差は平均で3〜5mm程度であり、実務上は同等精度といえます。今後はVRS専用測量機材でも同様の比較を行い、地域や環境条件によるZ値の傾向変化を継続的に観察していく予定です。
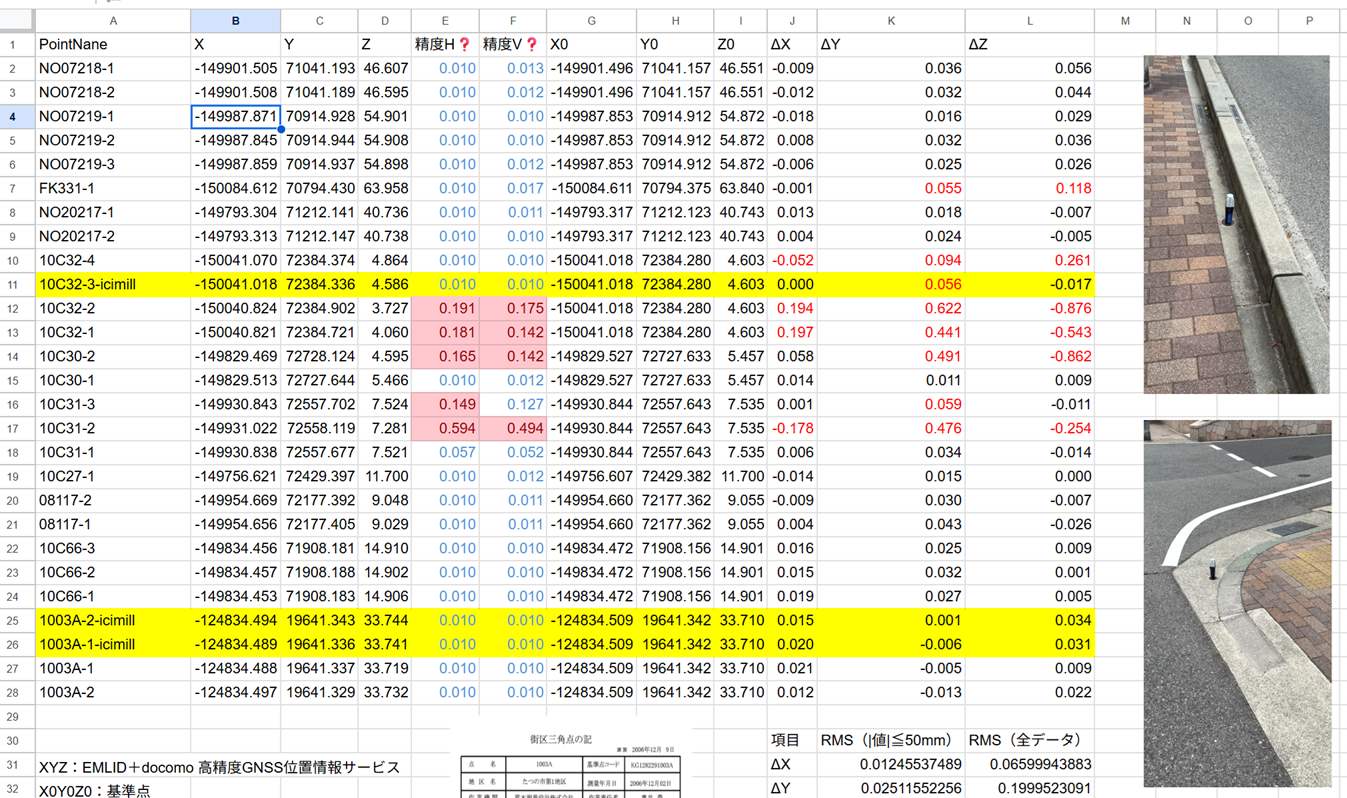
【使用条件】
使用機材:Reach RX
使用アプリケーション:PIX4Dcatch
【考察】
精度の傾向について
同一条件下では、神戸市内において docomo が ichimill よりもやや精度が高い傾向が見られました。
- ichimill:15mm~50mm
- docomo:15mm~40mm
※あくまで感覚的な比較です。基
FIX化状態について
両者の間で顕著な差は見受けられませんでした。
GNSS環境・接続安定性について
こちらについても、両者に大きな違いは感じられませんでした。
基準点の端点計測に「docomo」は国土地理院設置の電子基準点、ドコモ設置の基準点を併用しているからでしょうか。「ichimill」との併用でもっと数多くの検証を行ってみたいと思います。


PIX4Dcatch (ARポイント) · 10.06.2024
PIX4Dcatch RTK Roverが接続されている場合、インポートされた既知のポイントを表示するための拡張現実 (AR) が含まれるようになったのでテストしてみました。国交省の基準点座標を幾つかインポートし「ARポイント」を起動。画面に「旗立」された基準点がAR表示され、矢印やラインで誘導されるので、簡単に見つけることができました。試しに座標計測も実施。較差も「X=-0.001,Y=0.037,Z=0.024」と良好でありました。

GIS運用セミナーを開催 · 10.10.2022
滋賀県職業能力開発短期大学(ポリテク滋賀)様において、「地理情報システム運用におけるオープンデータ利活用実践技術」と題して、「QGIS・SIS」を使って2日間セミナー担当させて頂きました。

展示会に行ってきました · 07.09.2022
兵庫県が推進している事でもあり、神戸で開催された展示会に見学に行ってきました。兵庫県内の企業様も多く展示され、色々意見交換もできました。実りある時間が過ごせました。
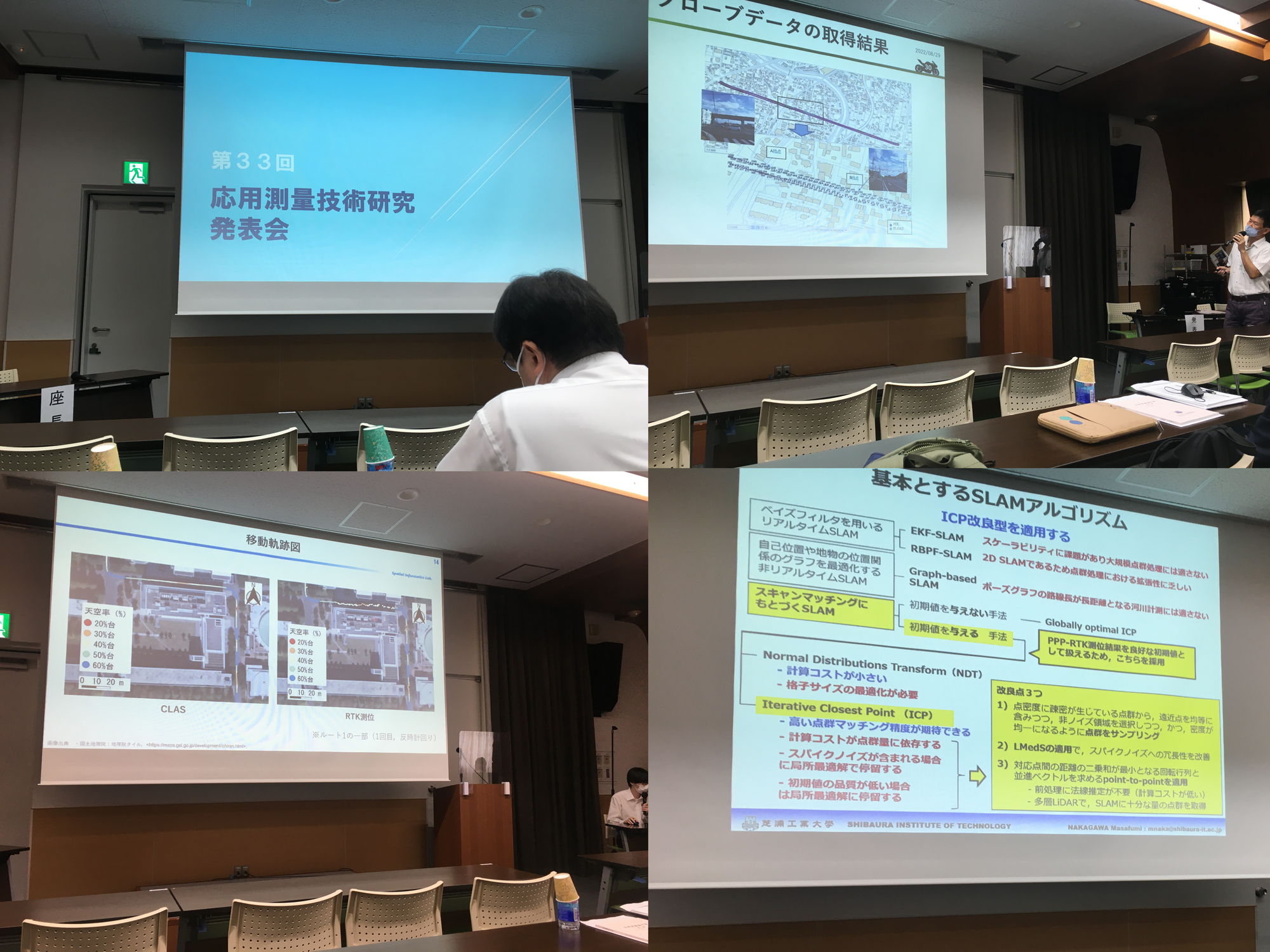
応用測量論文発表会へ参加 · 02.09.2022
測量協会主催の「応用測量技術研究発表会」に参加しました。今回報告書としてお手伝いさせて頂いた事例の発表や、他の論文など興味深い内容も多く、とても充実した時間となりました。
「CLAS」に関する事やLiDARSLAMに関する事等、今後の活動にも役立つと思える新しい発見もありました。やっぱり現場で、リアルに対話する事は大切だと改めて思える出張でした。

GeoSLAMとIchimillによる3D回転移動 · 08.04.2022
久しぶりの東京です。ご一緒にお仕事させて頂いている株式会社イメージワン様に同行し、GeoSLAM社 ZEB-HORIZONによる3D点群データ取得と、Ichimillサービスによる公共座標変換のテストデータ取得しました。基準点も同時に数か所計測しているので、較差の検証を行ってみます。あえてのGPSが入りづらい環境(橋脚下やトンネル内)を想定しての3D点群データ取得と公共座標変換です。精度検証結果がどうなるかです。